Investigators:
Sangbae Kim, Sami Habib
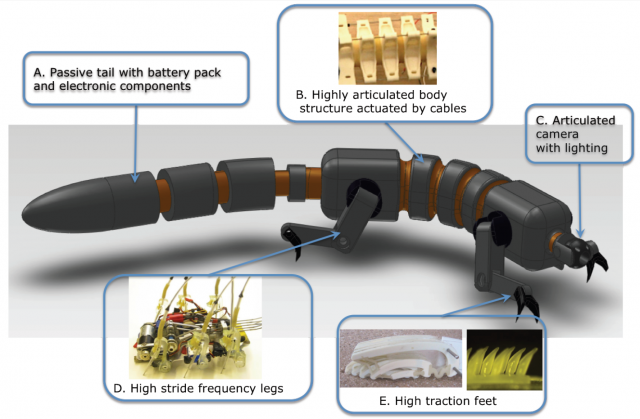
The project aims at developing bio-inspired crawling robots to, among several things, discover the spatial water pipeline topology in Kuwait. The research will provide a new technology that can potentially replace wheel-based pipe inspection robots that utilize propulsion and traction.
Technical Report (FINAL): Development of Pipe-Crawling Robot for Pipeline Network Discovery